Compound SemiconductorJEL

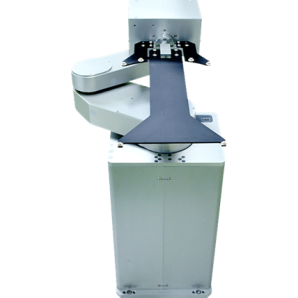

1. 无尘室用多轴结构设计,4轴水平多关节机械手臂。
2. 具备450mm晶圆翻转功能,边握式Chuck。
3. 高强度手臂/手臂第3关节部分可承受4kgf 以下(包含Chuck,晶圆的重量)
4. 具备晶圆翻转机构的边握式Chuck,可订制同时搬运5片300mm晶圆的Chuck
5. 机械手臂驱动部分采用AC伺服马达
6. 采用S曲线加减速控制以及对运转轨迹的优化调整,实现高速,高精度地完成晶圆传输。
7. 根据设备的配置可以选择底座固定方式,或法兰(颈部)固定方式
8. 可选购伯努利方式Chuck(Option)
9. 电源:单相 AC200V±10% 10A 真空:-53kPa以上
10.控制通讯方式:串行RS232C或并列光学I/O